Borg Turtle - Parasitic Robot Controls Turtle
- Ken Ecott
- May 23, 2017
- 4 min read
Robots are preparing to become humanities masters by learning to control turtles.
By first getting the reptiles to associate a red light with food, the shell-attached robots can dictate where the turtle moves around a tank, creating a rather unusual parasitic relationship.
It’s going to be a long, long time before we have amphibious robots that are anywhere near as capable as the mighty and majestic turtle. While many roboticists are working diligently on TurtleBots of all kinds, researchers at the Korea Advanced Institute of Science and Technology (KAIST) have taken things much more literally with the development of a robot-turtle hybrid: a “parasitic robot,” as they call it, that lives on the back of a real turtle, guiding the animal from place to place with the aid of an array of LEDs coupled with positive reinforcement from tasty turtle snacks.
Animals have millions of years of evolution, which has carefully optimised their design towards versatile and efficient locomotion. Robots do not have anywhere near that kind of range of movement, and they suffer from all kinds of specific limitations as well as a sort of general comic ineptitude that keeps them from being useful most of the time, especially when try to do basic, simple tasks that animals excel at.
In a recent paper in the Journal of Bionic Engineering, the KAIST researchers argue that animal-robot hybrids “could provide an alternative solution to some of the limitations of conventional mobile robot systems in various fields.” They could assist, for example, in search-and-rescue missions that are difficult for humans and robots to do on their own. They could also provide biologists and other scientists with new ways of studying animal behavior.
The South Korean team, led by Professor Phill-Seung Lee, head of KAIST’s Computational Mechanics and Structural Systems lab, designed their parasitic robot to physically attach to its host animal and use a combination of stimuli and rewards to produce specific behaviors.
They chose a turtle in part due to its inherent capabilities: It’s amphibious, has good eyesight and a long term memory, and comes equipped with a convenient shell, ideal for mounting parasitic hardware. Also, it’s slow enough that it was easy for the researchers to observe and control. (The group says they followed “all applicable international and institutional guidelines for the care and use of animals” in research.) From the paper:
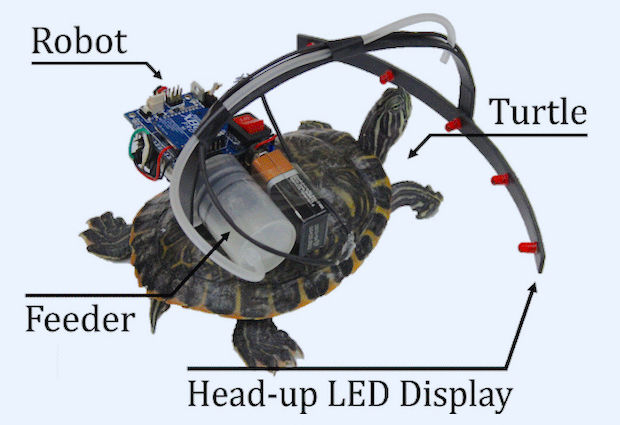
"We developed a parasitic robot for the turtle to achieve a waypoint navigation task in a water tank. We observed the parasitic robot and turtle interaction and recorded the extent to which the waypoint navigation performance of the parasitic robot is improved. To this end, a heads-up display for the turtle was adopted as the virtual stimulator for navigation. The parasitic robot used a heads-up display (cue) and feeder (reward) to train the turtles to move in a certain direction of the heads-up display."
The parasitic robot controls the turtle (a red-eared slider, for you turtle enthusiasts out there) through what’s called operant conditioning. First, the turtles were fed next to a red LED that turned on only at mealtimes for two weeks, so that the turtles learned to associate a red LED with food. Then, the parasitic robot was attached to their shell, including a turtle-size augmented reality display consisting of a strip with five red LEDs spaced in a 120 degree arc in front of its face. Since the turtles already associated red LEDs with food, turning one of those red LEDs on caused the turtle to move in that direction. The parasitic robot rewarded the behavior by “ejecting a gel-type food from a syringe using a linear servo motor.”
The parasitic robot controls the turtle (a red-eared slider, for you turtle enthusiasts out there) through what’s called operant conditioning. First, the turtles were fed next to a red LED that turned on only at mealtimes for two weeks, so that the turtles learned to associate a red LED with food. Then, the parasitic robot was attached to their shell, including a turtle-size augmented reality display consisting of a strip with five red LEDs spaced in a 120 degree arc in front of its face. Since the turtles already associated red LEDs with food, turning one of those red LEDs on caused the turtle to move in that direction. The parasitic robot rewarded the behavior by “ejecting a gel-type food from a syringe using a linear servo motor.”
Future work may include “the development of virtual reality technology and an enhanced sensor system, which would create a more immersive environment. Basically, it’s a turtle version of “The Matrix.”
Experiments with a group of five turtles over a period of five weeks showed that the parasitic robot was able to reliably guide the turtles along specific paths, traversing a 5-meter course in an average of 75 seconds. Furthermore, the constant reinforcement provided by the parasitic robot meant that the turtles’ performance continually improved. By the last day of the experiment, turtles were completing the course with an average deviation from the ideal route of just over 3 percent.
The researchers note that they’ve still got plenty of work to do before a system like this can be real-world useful. Turtles, like most animals, can be easily distracted by things in their environment, and the parasitic robot only has a limited amount of influence over the turtle’s attention. Future work may include “the development of virtual reality technology and an enhanced sensor system,” which would create a more immersive environment to make sure that the robot maintains control. Basically, it’s a turtle version of “The Matrix.” With that in mind, you won’t be at all surprised to hear that the researchers also want to find ways for the robotic parasite to harvest energy directly from its host.


Comments